Это понятно, что научиться программировать не простое дело и это умение приобретается годами.
Сначала объясняю для чего мне это надо:
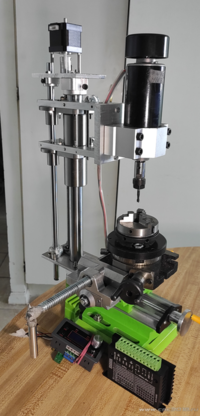
Делаю настольный сверлильно-фрезерный станок для хобби. Станки портального типа мне не подходят. Имею некоторый опыт работы на мини фрезерном станке (не ЧПУ) по изготовлению простых деталей из алюмния 6061 и из делрина.
Станок показан на фото. Есть в наличии два перекрёстных стола и стандартный поворотный стол с ручным управлением.
Второй стол 300 мм (ход 200мм х 55мм сейчас в разобранном состоянии). В нём заменяются винт-гайка на T8 трапециевидные ходовые винты диаметр 8 мм шаг 2 мм ход 2 мм и устанавливаются опорные подшипники опорный из цинкового сплава KFL08. Электроприводы шаговые двигатели Nema 17. Кроме этого для минимизации люфта в парах винт-гайка установлены стандартные регулируемые копенсаторы из делрина, которые уже доработаны до нужных размеров.
По оси Z ходовой винт-гайка Т8 ход 8мм/об. Nema 17. Драйвер шагового двигателя TB6600. Контроллер шагового двигателя SMC02 позволяет точно управлять энкодером от руки глубиной сверления и фрезеровки.
Испытания показали весьма хорошую совместимость этого комплекта привода с показанной на фото конструкцией оси Z.
Для точной обработки детали вручную, в наличии есть два комплекта не дорогих электронных линеек с датчиками ( 4 канала X,Y,Z,A ).
Это получается пока самый понятный для меня вариант управления станком.
Что касается разметки и точного сверления отверстий в заготовке, то наверное можно сразу делать проект и в других КАД программах. Просто я привык к Sprint-Layout, хотя это и не очень удобно, но для простых одиночных деталей для хобби пока приемлимо.
Вопрос такой:
Если использовать такой комплект как на фото 88, можно-ли с дистанционного пульта вручную управлять движениями стола и по ос Z так же как показал выше. Для начала контролировать размеры по электронным линейкам.