- Регистрация
- 18.09.2024
- Сообщения
- 0
- Реакции
- 5
- Баллы
- 27
- Город
- Екатеринбург
- Имя
- Евгений
- Станок
- Был 1610, стал 1815
- Плата
- MKS DLC32 v2.1 + TS35-R
- Прошивка
- V2.1.0
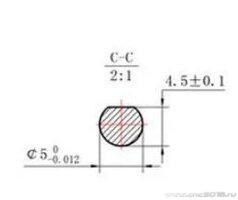
Всем привет, решил поменять шаговые двигатели с нонейма (быстрее всего это 17HS3401) на Nema 17 (17HS4401), но у них вал в сечении не круглый... а с выборкой... возник вопрос муфта шагового двигателя на него нормально встанет, не будет болтаться? Просто есть движки у которых нормальные круглые валы, а есть с выборкой? И вообще имеет смысл такой апгрейд?
Фото вала прилагаю...
Фото вала прилагаю...